澳门十大赌城官方网站
你的位置:澳门十大赌城官方网站 > 21点 >


本篇著述被 ICRA 2026 经受并赢得 IROS 2025 双料 Workshop 最好论文,第一作家张子哲(site: zizhe.io)是宾夕法尼亚大学机器东说念主学硕士生,同期在 GRASP 实际室担任科研助理,导师为 Nadia Figueroa 进修,商酌酷爱涵盖机器学习,安全适度以及东说念主机交互。

论文标题:Viability-Preserving Passive Torque Control
{jz:field.toptypename/}论文联接:https://arxiv.org/abs/2510.03367
名堂主页:https://vpp-tc.github.io/webpage/
一、一句话转头
本文提倡了 VPP-TC(Viability-Preserving Passive Torque Control),一种基于可行性(viability)表面的被能源矩适度框架。该框架在要道位置 - 速率的增广景况空间中瞻望算安全皆集,将可行性按捺疏浚为要道加快度(进而力矩)的仿射按捺,通过二次打算(QP)及时求解,确保机器东说念主在无穷时分畛域内永恒处于安全皆集内。比较基于适度障蔽函数(CBF)的基线体式,VPP-TC 无需筹备畛域函数的二阶导数,适度回路频率更高、轨迹更平滑、旅途更短。
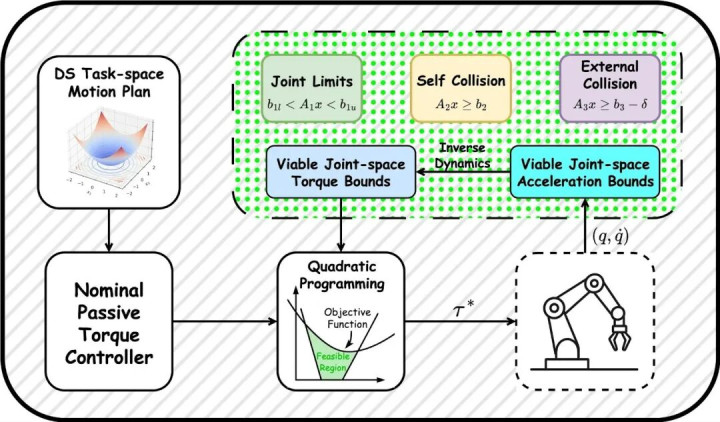
图 1:VPP-TC 适度框架暗示图。要道限位的力矩按捺通过认识体式推导,自碰撞和外部碰撞按捺通过数据驱动体式学习。
二、商酌配景与动机
在物理东说念主机交互(pHRI)场景中,机器东说念主需要在与东说念主类近距离和谐时保捏被迫性(passivity)—— 即接收的能量不少于开释的能量,从而保证在外部扰动下的鲁棒性和融会性。经典的阻抗 / 导纳适度框架、Port-Hamiltonian 体式以及基于能源系统(DS)的被能源矩适度器已被无为商酌。
但是,这类被迫适度器频繁短少显式的按捺处理才调,无法保证在所有这个词这个词任务推论流程中的碰撞幸免和要道限位欢喜。先前责任 CPIC 愚弄适度障蔽函数(CBF)框架和指数适度障蔽函数(ECBF)来按捺被能源矩适度器,但存在以下问题:
硬按捺之间可能相互打破,导致 QP 不能行;
QP 框架易堕入死锁和要道空间的局部最小值;
ECBF 需要筹备畛域函数的 Hessian 矩阵(二阶导数),当畛域由神经集聚浮现时,及时性难以保证。
恰是这些局限性,促使作家提倡了基于可行性表面(viability theory)的全新安全适度框架。
三、体式详解
3.1 中枢想想:从 CBF 到 Viability
VPP-TC 的中枢翻新在于:在要道位置 q 和要道速率 q̇的增广景况空间中引入安全畛域,而非仅在要道位置空间中。在这个增广空间中操作的平正是,安全按捺不错径直推导为要道加快度 q̈的仿射按捺,再通过机器东说念主能源学方程疏浚为力矩按捺 —— 所有这个词这个词流程无需筹备畛域函数的二阶导数。
可行性的界说(Definition 1)是:从可行集 V 中的轻易运事业态开拔,存在一个适度序列(加快度序列),使得产生的无穷长景况序列永恒在可行集内。这比单纯的「可行」(feasible)更强 —— 一个可事业态可能在将来的适度下离开可行集,但一个 viable 景况保证能永远留在安全集内。
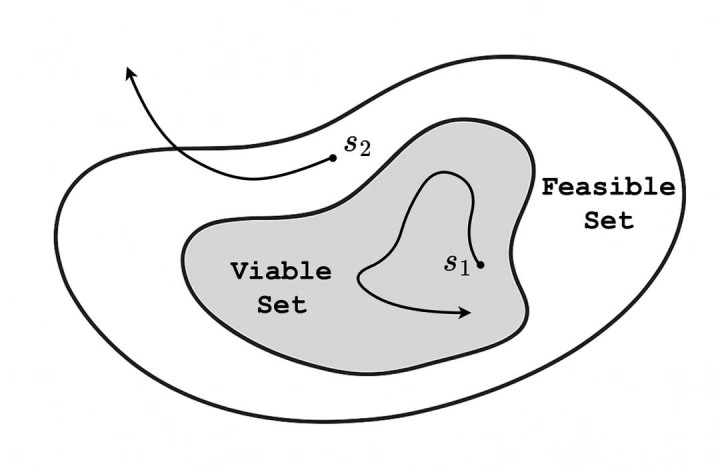
图 2:可行性(viability)看法。景况 s1 既可行又 viable,而 s2 可行但不 viable—— 自然面前欢喜按捺,但不存在一个适度序列能保证它永远留在安全集内。
3.2 自碰撞幸免按捺(SCA)
作家保守地界说了自碰撞可行性(Definition 2):若是从面前景况开拔,以最大延缓反向制动至竣工住手的整条制动轨迹上都不发生自碰撞,则觉得该景况是自碰撞安全的。
为学习这个可行集,作家使用了一个基于 Transformer 的神经集聚分类器 Γ(q, q̇)。考试数据通过仿真生成:采样 300 万组 (q, q̇) 景况对,模拟制动流程并标注 —— 若制动轨迹无自碰撞则标为 viable,不然标为 non-viable。集聚取舍要领 Transformer-Encoder 架构(前馈维度 128、2 个介意力头、4 层堆叠),考试 30 个 epoch,测试集准确率达 99.27%,调回率达 99.74%。
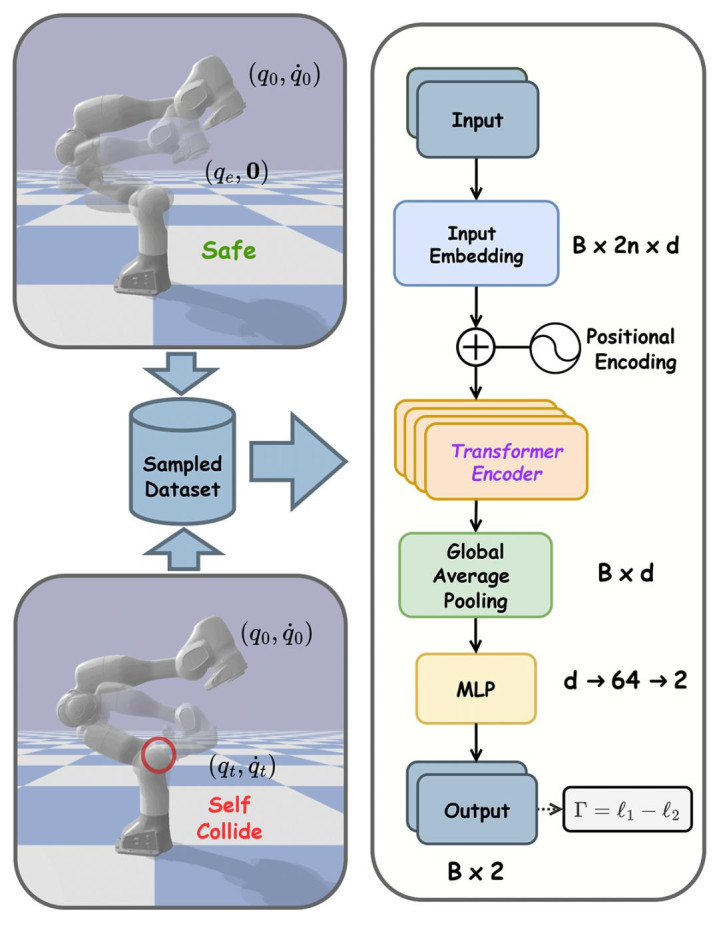
图 3:自碰撞可行性数据生成。从景况 (q₀, q̇₀) 开拔推论制动直至静止 (qₑ, 0):若整条轨迹无自碰撞,标记为 Safe;不然标记为 Self-Collide。
按捺的实施通过 Taylor 张开将 ΔΓ(q, q̇) ≥ 0 线性化为对于 q̈的仿射按捺,澳门赌城app再通过能源学方程疏浚为力矩按捺。要害公式为:
g_se・M⁻¹τ ≥ g_se・M⁻¹(Cq̇ + G) − b_s
其中 g_se 和 b_s 由畛域函数 Γ 对 q 和 q̇ 的一蹊径度与时分步长筹备得到。
3.3 外部阻截物碰撞幸免按捺(ECA)
对于外部碰撞,作家取舍 Bernstein 多项式浮现的标识距离函数(SDF) 编码每个机器东说念主连杆的几何。界说可行性保捏 SDF 为制动轨迹上的最小瞬时 SDF:
S_v (p, q₀, q̇₀) = min_{t∈[0,T_br]} S (p, q (t))
访佛地,通过 Taylor 张开得到对于 q̈的仿射按捺,并疏浚为力矩按捺。值得介意的是,该按捺通过 Δp 项隐式地纳入了阻截物速率信息,因此 VPP-TC 自然具备处理动态阻截物的才调。
3.4 要道位置与速率限位按捺
受 Del Prete (2018) 启发,作家通过认识推导赢得要道加快度的高下界 q̈_lb 和 q̈_ub,取位置可行性按捺、速率按捺和硬件加快度限制的错杂,再通过能源学方程疏浚为力矩按捺。
3.5 合伙的 QP 适度框架
最终的适度框架将所有这个词按捺合伙到一个二次打算(QP)问题中:目标函数最小化骨子力矩与形式被迫适度器力矩的偏差,按捺条款包括要道限位(永恒激活)、自碰撞按捺(麇集畛域时激活)、外部碰撞按捺(麇集畛域时激活)和力矩硬件限制。外部碰撞按捺通过随心变量软化以保证 QP 可行性。
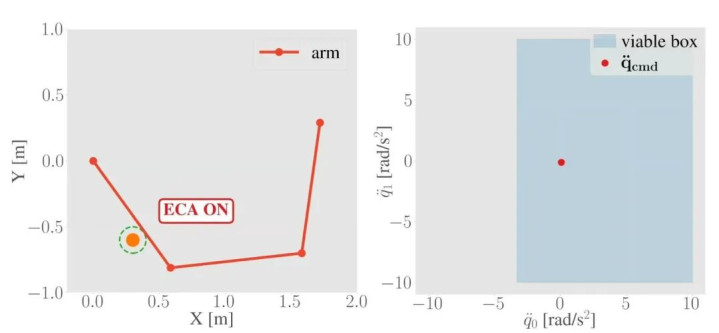
图 4:平面 3-DoF 示例。左:责任空间轨迹。右:在硬件限制 [−10, 10] rad/s² 下的可行加快度域。当外部碰撞按捺激活时,允许的加快度域缩小。
四、实际遵守
4.1 仿委果际
在 7 目田度 Franka Panda 机械臂上(PyBullet 仿真),作家遐想了三组对比实际:仅自碰撞幸免(SCA)、仅外部碰撞幸免(ECA)、以及全按捺(ALL)。与基线 CPIC 的定量对比如下表:

表 1:CPIC 与 VPP-TC 在不同按捺建造下的性能对比(5 次实际平均值)
VPP-TC 在所有这个词建造下都显贵优于 CPIC:适度频率擢升 1.4–2.4 倍,轨迹长度更短,轨迹抖动裁减了一个数目级以上(至极是在 ECA 和 ALL 场景下)。
4.2 真机实际
作家在 7-DoF Franka Panda 真机上考据了三个场景:
自碰撞幸免(SCA):未启用 SCA 时,机械臂因自碰撞预警触发 Reflex Mode 住手融会;启用 SCA 后安全到达目标。更换 UMI 夹爪后重训集聚,适度器仍灵验。
外部碰撞幸免(ECA):面临静态和动态阻截物,机械臂在被外力推向阻截物时能违反融会并保捏安全间距;动态阻截物接近时主动辞让。在约 200Hz 的适度频率下罢了委果的全身碰撞幸免。
玄虚场景:遥操作按台灯开关任务 —— 仅提供死板目标位置,无瞻望算的避障轨迹。VPP-TC 同期处理外部碰撞(台灯灯体)和自碰撞按捺,安全完成任务。
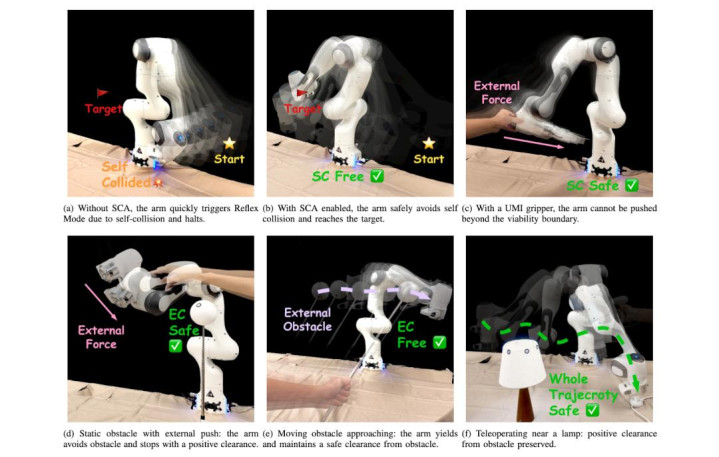
图 5:真机实际。上排:自碰撞幸免(a-c)。下排:外部碰撞幸免(d-f)。轨迹重复涌现按捺激活后机械臂保捏正向间距。
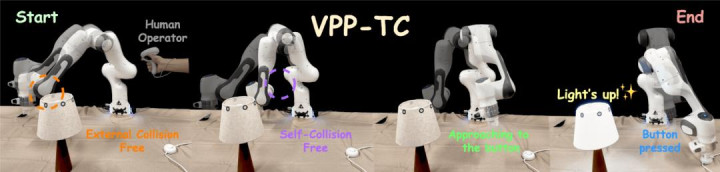
图 6:遥操作任务 —— 仅提供死板目标位置,VPP-TC 确保近灯安全并防护自碰撞,胜利完成按灯开关任务。
五、技能亮点与参谋
1. 无需二阶导数。通过在 (q, q̇) 增广景况空间中操作,安全按捺被抒发为对于加快度的仿射函数,仅需要畛域函数的一蹊径度。这大幅裁减了筹备包袱,是罢了高适度频率的要害。
2. 合伙框架处理多类按捺。要道限位、自碰撞、外部碰撞三类按捺在合并 QP 中合伙处理,按捺按需激活,框架无意优雅。
3. 自然守旧动态阻截物。外部碰撞按捺的 Taylor 张开中包含阻截物位移 Δp 项,隐式编码了阻截物速率,无需特等处理即可应酬动态环境。
4. 全身碰撞幸免。收获于 Bernstein 多项式 SDF 的高效筹备,VPP-TC 能筹商所有这个词机器东说念主连杆的几何,而非像 CPIC 那样仅筹商结尾几个连杆。
5. 被迫性保证。论文在附录中阐述了即使在按捺激活时,适度器输出的力矩仍保捏任务空间被迫性 —— 按捺反作使劲要么被阻尼耗散,要么被按捺反力接收,不向环境注入净能量。
将来地方:面前框架假定精准的能源学模子。作家筹谋在将来责任中筹商有界的模子不细目性,遐想在建模裂缝下仍能保证可行性的鲁棒适度器。
六、转头
VPP-TC 为被能源矩适度的安全性问题提供了一套优雅而高效的管束决策。它将可行性表面与数据驱动学习相结合,在增广景况空间中构建安全皆集,并通过 QP 及时求解力矩按捺。这一框架在 IROS 2025 两个 Workshop 上分辩赢得 Best Contribution Award 和 Best Student Paper Award,并被 ICRA 2026 委派,充分体现了其学术价值和应用后劲。对于激情东说念主机交互安全、力矩适度以及机器东说念主安全保险的商酌者而言,这是一篇值得深切研读的责任。
下一篇:没有了
 备案号:
备案号: